خودکار فیکٹریوں میں صنعتی روبوٹ کے وسیع پیمانے پر استعمال سے پیداوار کی کارکردگی میں نمایاں بہتری آئی ہے۔ صنعتی روبوٹ کا بنیادی طریقہ کار ایک مکینیکل بازو ہے۔ کثیر ڈگری آف فریڈم ساختی ڈیزائن روبوٹک بازو کو انتہائی اعلی لچکدار ہونے کی اجازت دیتا ہے۔ یہ پوائنٹس کو درست طریقے سے تلاش کرسکتا ہے اور خلا میں دیئے گئے راستے کے مطابق حرکت کرسکتا ہے۔ مکینیکل بازو کا روٹری میکانزم فی الحال روٹری ہائیڈرولک سلنڈر یا ایک سروو موٹر کا استعمال کرتا ہے تاکہ ایک کے ذریعہ روٹری ایکشن کا ادراک کیا جاسکے۔سلینگ انگوٹھی برداشت کرنا۔
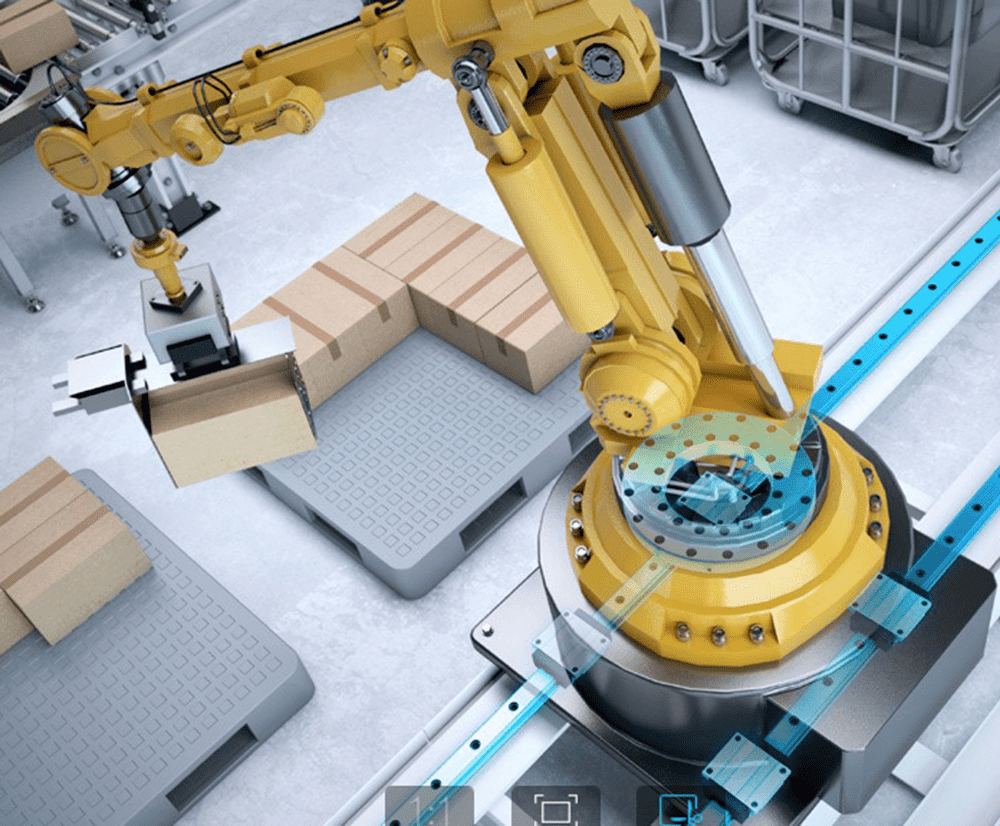
برداشت کرنااسے بھی جانا جاتا ہےسلینگ انگوٹھی برداشت کرنا,ٹرنٹیبل اثر. اس میں بیرونی انگوٹھی ، اندرونی رنگ ، رولنگ باڈی ، مہروں پر مشتمل ہے۔ ہماری مصنوعات کا مواد عام طور پر اعلی مصر دات کے ساختی اسٹیلز ہوتے ہیں ، جیسے 42crmo ، 50mn.theسلوانگانگوٹھیبرداشتعام طور پر -30 ℃ سے +70 ℃ کے درجہ حرارت پر کام کر سکتے ہیں ، اور ہم کسٹمر کی ضرورت کے مطابق خصوصی قسم کا ڈیزائن کرسکتے ہیں۔
سلینگ رنگ کا اثرصنعتی روبوٹ کی ترقی میں ایک اہم کردار ادا کرتا ہے ، لہذا یہ بڑے پیمانے پر "مشین کا مشترکہ" کے نام سے جانا جاتا ہے۔ صنعتی روبوٹ مینوفیکچرنگ ورکشاپس میں بڑے پیمانے پر استعمال ہوتے ہیں۔ ان کی درستگی کی ضروریات کی وجہ سے ، جدید صنعتی روبوٹ عام طور پر استعمال کرنے والی رنگوں کا استعمال عام طور پر استعمال کرتے ہیںکراس رولرسلینگ انگوٹھی برداشت کرنا۔ XUZHU WANDAسلینگ بیئرنگ کمپنی ، لمیٹڈماڈل 11 سیریز ہےسلینگ انگوٹھی برداشت کرنااس استعمال کو پورا کرسکتے ہیں۔

پوسٹ ٹائم: مئی 11-2020